Avant de décider de commander un encodeur rotatif, voici quelques questions qui peuvent vous aider à prendre la meilleure décision.
A. Avez-vous besoin d'un codeur incrémental ou d'un codeur absolu ?
B. Quelle est la sortie du signal et la tension d'alimentation ?
C. Quelle résolution la candidature demande-t-elle ?
D. Comment monter cet encodeur et comment connecter l'encodeur aux commandes ?
E. Quelles contraintes environnementales et mécaniques le codeur doit-il supporter ?
Il est très important que vous confirmiez les bonnes caractéristiques du codeur pour votre application.
Revenons maintenant à chaque question et explorons les nombreuses options qui s'offrent à vous lors de la sélection d'un codeur rotatif industriel.
A. Avez-vous besoin d'un codeur incrémental ou d'un codeur absolu ?
Des codeurs incrémentaux et absolus peuvent être utilisés pour la vitesse, la direction et la position.
La différence entre codeur absolu et codeur incrémental est :
1. Le codeur absolu conservera votre position après une coupure de courant, contrairement à un codeur incrémental.
Le codeur incrémental doit généralement effectuer une séquence de « homing » après une coupure de courant.
2. Les codeurs incrémentaux sont généralement moins chers et la sortie nécessaire est une onde carrée pour le comptage, la vitesse et la direction.
Les codeurs absolus sont normalement utilisés pour la position continue et possèdent d'autres attributs tels que des fonctions de vitesse, de mise à l'échelle, de préréglage et de bus de terrain.
B. Quelle est la sortie du signal et la tension d'alimentation ?
Pour la sortie du codeur incrémental, il existe un collecteur ouvert (NPN), PNP, push-pull, pilote de ligne.
1. Le collecteur ouvert NPN -- Le NPN Open Collector (NPN) est une interface basée sur un circuit de sortie avec un transistor NPN.
Un collecteur ouvert est la connexion collecteur non connectée d'un transistor NPN, dont l'émetteur est connecté à la terre et dont le collecteur est connecté à la sortie.
2. Sortie PNP
La sortie PNP est une interface basée sur un circuit de sortie avec un transistor PNP.
3. Sortie push-pull (HTL)
La logique à transistors haute tension fonctionne avec une alimentation en tension comprise entre 10 et 30 V CC, 24 V CC étant la plus courante.
'Low' est défini comme une sortie comprise entre 0 V et 3 V et 'high' entre VCC et VCC - 3,5 V.
4. Sortie TTL RS-422
Dans une logique transistor-transistor (TTL), l'état logique et l'amplification sont effectués par des transistors, d'où le nom.
La sortie TTL est alimentée soit par une tension fixe de 5 V, soit par une tension variable comprise entre 10 et 32 V. Pour cela, la plage basse est définie comme ≤ 0,4 V et la plage haute comme ≥ 2,4 V.
5. Tension d'alimentation :
DC5V ou DC8-30V
C Quelle résolution la candidature demande-t-elle ?
Pour déterminer la résolution, la circonférence de la pièce rotative (qu'il s'agisse d'une poulie, d'un engrenage, d'une roue de mesure ou d'un câble) devra être divisée par les impulsions par tour de l'encodeur.
Par exemple, si vous aviez une roue de mesure de circonférence de 200 mm et un encodeur incrémental de 5 000 ppr, la résolution serait de 0,04 mm.
Sens de rotation, dans le sens des aiguilles d'une montre (cw) Rotation vers la droite lorsque l'on regarde l'arbre.
Sens de rotation, dans le sens inverse des aiguilles d'une montre (ccw) Rotation vers la gauche, lorsque l'on regarde l'arbre.
D. Comment monter cet encodeur et comment connecter l'encodeur aux commandes ?
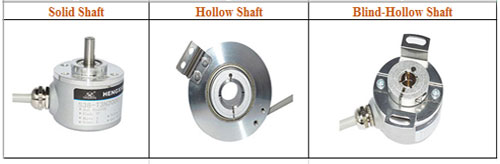
Le codeur peut être sélectionné avec un arbre plein, un arbre creux ou un arbre creux borgne.
L'arbre creux et l'arbre creux encastré sont faciles et rapides à monter.
Mais s'il y a un mouvement ou un « faux-rond » dans l'arbre, l'arbre plein avec l'accouplement approprié serait la meilleure solution.
Un accouplement peut avoir un décalage radial de +/- 1,5 mm, un décalage axial de +/- 1 mm et peut avoir une erreur angulaire de 5 degrés.
Cela peut être suffisant pour éviter de surcharger les roulements du codeur.
Smanche Touais :
Direction de sortie du câble :

Les encodeurs peuvent être sélectionnés avec câble ou connecteur.Si vous choisissez l’option connecteur, vous aurez besoin d’un connecteur homologue ou d’un cordon (connecteur et câble).Cela vous donnera un point de connexion à l'encodeur mais ne vous mènera pas nécessairement jusqu'à votre armoire de commande.En fonction de la distance, vous aurez peut-être besoin d'une boîte de jonction, d'un conduit et d'un chemin de câbles.Des précautions doivent être prises lors de l'acheminement du câble du codeur pour réduire l'influence du « bruit ».Pour réduire cette influence, le câble doit avoir un blindage tressé autour des fils et les fils doivent être des paires torsadées.Le câble de l'encodeur doit être placé dans un conduit avec uniquement des câbles à faible tension continue et garder les câbles CA et haute puissance séparés.S'il existe des chemins de câbles avec des câbles AC et DC, il doit y avoir un séparateur métallique mis à la terre entre les câbles DC et AC.Si le câble de l'encodeur doit croiser un câble CA, il doit se croiser perpendiculairement (90 degrés l'un par rapport à l'autre).Le blindage doit être connecté à un emplacement de mise à la terre dans votre armoire de commande (il a donc une topologie en étoile).
E Quelles contraintes environnementales et mécaniques le codeur doit-il supporter ?
Pour les aspects environnementaux, la quantité d’humidité, la durée de l’humidité, les produits chimiques et le programme de nettoyage doivent être vérifiés.
L'indice IP50 convient à la plupart des applications avec une exposition minimale à l'humidité, mais si l'humidité est présente pendant une durée plus longue, vous devez sélectionner IP65 ou IP67.











