Les capteurs codeurs incrémentaux fournissent un signal de sortie de circuit sur une seule ligne de transmission.
le capteur doit être connecté à un contrôleur.
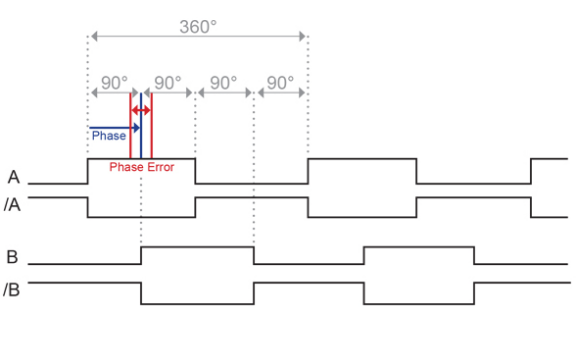
Un codeur incrémental possède au moins 1 signal de sortie « phase A » ou généralement 2 signaux de sortie, appelés phases « A » +« B ».Ces 2 signaux sont établis avec un décalage de 90°, nécessaire à la détection de la rotation du codeur.En tournant l'encodeur dans le sens des aiguilles d'une montre, l'impulsion 'A' monte 90° avant l'impulsion 'B', de la même manière, l'impulsion 'B' monte avant l'impulsion 'A' quand tourner l'arbre dans le sens inverse des aiguilles d'une montre.
En outre, certains codeurs incrémentaux génèrent un signal de phase « Z ».À chaque rotation, ce signal de phase Z augmente généralement de 90°, exactement à la même position.Cela peut être utilisé comme indicateur du point de référence précis.
Certains autres codeurs incrémentaux disposent également de signaux différentiels supplémentaires, appelés 'A-', '/B-' et 'Z-'.Ces signaux sont inversés des signaux 'A', 'B' et 'Z'.Les contrôleurs peuvent comparer chaque paire (« A » doit être égal à « A- » inversé) pour s'assurer qu'il n'y a pas d'erreur lors de la transmission du signal.
En commun, la sensibilité de transmission est améliorée en transmettant les signaux différentiels via un câble à paire torsadée.
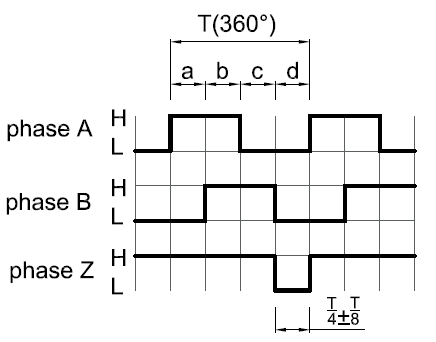
Un diagramme d'impulsions typique d'un codeur incrémental
Impulsions par tour (PPR) :
Un encodeur rotatif incrémental produit une certaine quantité d'impulsions par révolution.Plus ce nombre PPR est élevé, plus l'angle entre chaque impulsion est petit.Ce numéro PPR est fixe pour les codeurs incrémentaux ordinaires.
Aujourd'hui, la plupart des codeurs incrémentaux ont un pilote de sortie Push-Pull (également appelé HTL) ou RS422 (TTL), ceux-ci ont remplacé la plupart des anciens circuits de sortie comme Open Collector NPN, Open Collector PNP, Tension Output.
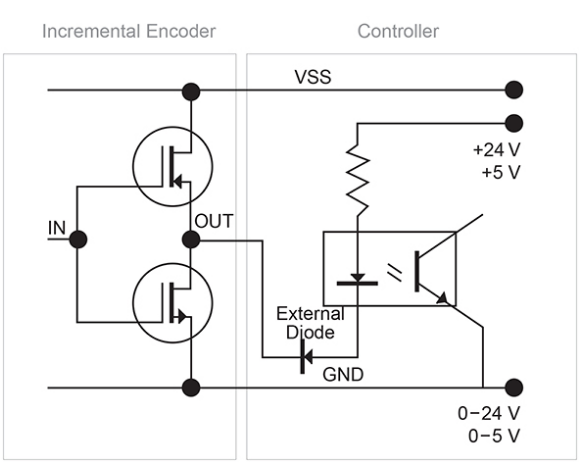
A) Sortie de signal push-pull (HTL)
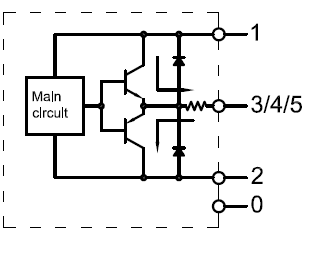
Les circuits Push-Pull (HTL), également connus sous le nom de circuits Totem Pole, fournissent un niveau de signal qui correspond à la tension d'alimentation appliquée.La tension d'alimentation varie généralement de 8 à 30 VCC, ou une large plage de 5 à 30 VCC.
Avec des connexions appropriées, vous pouvez utiliser l'interface Push Pull pour remplacer de véritables circuits à collecteur ouvert en utilisant une diode externe connectée de manière à limiter la direction du courant.
B) Sortie de signal RS422 (TTL)
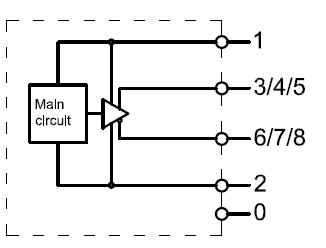
Les circuits RS422 (TTL) fournissent un niveau de signal constant de 5 V qui ne dépend pas de la tension d'alimentation.Deux plages de tension d'alimentation peuvent être sélectionnées : De 4,75 à 5,5 VCC (peut être utilisée pour remplacer les pilotes de sortie à collecteur ouvert) ou de 5 à 30 VCC.Grâce à des signaux différentiels, la sortie est entièrement conforme à la norme RS422.
Les sorties différentielles ont la capacité de réponse en fréquence la plus élevée et la meilleure immunité au bruit.
Pour garantir cela, le récepteur doit également être un circuit différentiel.
la courbe de remplacement de certains anciens pilotes de sortie
1) Remplacement du collecteur ouvert PNP (source actuelle)
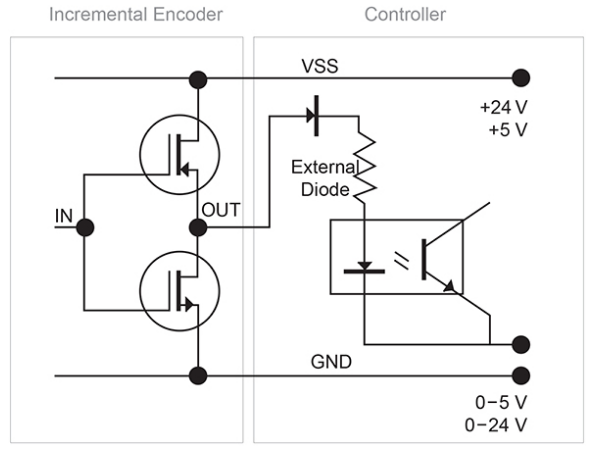
2) Remplacement du collecteur ouvert NPN (Current Sink)
Niveaux de sortie de tension :
Une porte logique interprète certaines tensions d'entrée comme étant élevées (logique 1) ou faibles (logique 0).
TTL (transistor-transistor-logic) : un signal supérieur à 2 V est interprété comme un 1 logique et un signal inférieur à 0,8 V est interprété comme un 0 logique. La tension de sortie est comprise entre 0 et 5 V.
HTL (logique à seuil haut) : un signal supérieur à 3 V est un 1 logique et un signal inférieur à 1 V est un 0 logique. Le niveau du signal de sortie haut dépend de la tension d'alimentation.En raison de la différence de tension plus élevée entre les logiques 0 et 1, la logique HTL est plus insensible aux interférences et plus résistante au bruit électrique.
| Logique | Niveau de signal | Tension d'alimentation | Tension de sortie |
| Durée de vie | Haut | 5-30 V | minimum 3 V |
| Faible | 5-30 V | maximum 0,5 V |
| HTL | Haut | 5-30 V | minimum 3 V |
|
| 8-30 V | Tension d'alimentation minimale - 3 V |
| Faible | 5-30 V | maximum 0,5 V |
Diplôme électrique et mécanique :
Le degré mécanique est la rotation réelle de l'arbre en degrés.Le degré électrique est utilisé pour les signaux électriques.Le temps requis pour réaliser un cycle tension/courant alternatif est défini comme 360 degrés électriques (el°).
Pour les codeurs incrémentaux, un cycle équivaut à une impulsion complète.Avec un PPR donné, le degré électrique peut être converti en degré mécanique pour n'importe quel codeur incrémental.
Quadrature:
Tous les 90 el°, le codeur incrémental émet un front montant ou descendant sur la sortie 'A' ou 'B' qui peut être interprété comme un comptage.Si un encodeur produit 1 000 PPR, un compteur peut interpréter 4 000 comptes (4 comptes par impulsion).
Angle de phase:
L'angle de phase indique la longueur entre 2 bords, donnée en el°.Ce paramètre est généralement spécifié avec une valeur d'angle de phase constante et une erreur d'angle de phase (également appelée erreur de quadrature).
Précision :
La précision est l'erreur d'angle de phase en valeur absolue exprimée en degrés (mécaniques).
Un codeur incrémental génère un nombre défini d'impulsions par tour, de sorte que chaque impulsion soit censée se trouver sur une position mécanique définie.L’écart maximum entre cette position idéale et la position réelle est appelé non-linéarité intégrale.la précision est une valeur importante si le codeur incrémental est utilisé pour des tâches de positionnement.
Cycle de service:
Le rapport cyclique décrit le rapport entre le temps « haut » et le temps « bas » d'un codeur incrémental.Typiquement, ce rapport est de 50/50, ce qui équivaut à 180 el° haut et 180 el° bas.
Les performances des codeurs incrémentaux augmentent avec des paramètres PPR plus élevés et des vitesses de rotation (RPM) plus élevées.Ceci contraste avec les codeurs optiques où les performances diminuent.La précision indiquée dans nos fiches techniques correspond aux pires valeurs, une meilleure performance peut être attendue pour des PPR et des RPM plus élevés.
Fréquence de réponse:
Il s'agit de la fréquence maximale que le codeur peut émettre via les lignes de sortie.
Par exemple, la fréquence d'un encodeur 1024 PPR qui tourne à 1757 RPM est de 300K Hz (30 000*1024/60s).
Si vous avez encore des doutes sur la théorie du codeur incrémental, veuillez contacter notre technicien pour obtenir plus d'assistance.
email : heng@shhxgd.cn















